Environments
Environment list of MARLlib, including installation and description.
Note: make sure you have read and completed the Installation part.
SMAC

StarCraft Multi-Agent Challenge (SMAC) is a multi-agent environment for collaborative multi-agent reinforcement learning (MARL) research based on Blizzard’s StarCraft II RTS game. It focuses on decentralized micromanagement scenarios, where an individual RL agent controls each game unit.
Official Link: https://github.com/oxwhirl/smac
|
Cooperative |
|
Cooperative + Collaborative |
|
Partial |
|
Discrete |
|
1D |
|
Yes |
|
Yes |
|
1D |
|
Dense / Sparse |
|
Simultaneous |
Installation
bash install_sc2.sh # https://github.com/oxwhirl/pymarl/blob/master/install_sc2.sh
pip3 install numpy scipy pyyaml matplotlib
pip3 install imageio
pip3 install tensorboard-logger
pip3 install pygame
pip3 install jsonpickle==0.9.6
pip3 install setuptools
pip3 install sacred
git clone https://github.com/oxwhirl/smac.git
cd smac
pip install .
Note: the location of the StarcraftII game directory should be pre-defined, or you can just follow the error log (when the process can not found the game’s location) and put it in the right place.
MAMuJoCo
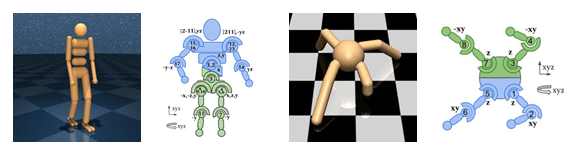
Multi-Agent Mujoco (MAMuJoCo) is an environment for continuous cooperative multi-agent robotic control. Based on the popular single-agent robotic MuJoCo control suite provides a wide variety of novel scenarios in which multiple agents within a single robot have to solve a task cooperatively.
Official Link: https://github.com/schroederdewitt/multiagent_mujoco
|
Cooperative |
|
Cooperative + Collaborative |
|
Partial |
|
Continuous |
|
1D |
|
No |
|
Yes |
|
1D |
|
Dense |
|
Simultaneous |
Installation
mkdir /home/YourUserName/.mujoco
cd /home/YourUserName/.mujoco
wget https://roboti.us/download/mujoco200_linux.zip
unzip mujoco200_linux.zip
export LD_LIBRARY_PATH=/home/YourUserName/.mujoco/mujoco200/bin;
pip install mujoco-py==2.0.2.8
git clone https://github.com/schroederdewitt/multiagent_mujoco
cd multiagent_mujoco
mv multiagent_mujoco /home/YourPathTo/MARLlib/multiagent_mujoco
# optional
sudo apt-get install libosmesa6-dev # If you meet GCC error with exit status 1
pip install patchelf-wrapper
Note: To access the MuJoCo API, you may get a mjkey (free now) and put it under /home/YourUserName/.mujoco.
Google Research Football

Google Research Football (GRF) is a reinforcement learning environment where agents are trained to play football in an advanced, physics-based 3D simulator. It also provides support for multiplayer and multi-agent experiments.
Official Link: https://github.com/google-research/football
|
Collaborative + Competitive |
|
Cooperative + Collaborative |
|
Full |
|
Discrete |
|
2D |
|
No |
|
No |
|
/ |
|
Sparse |
|
Simultaneous |
Installation
Google Research Football is somehow a bit tricky for installation. We wish you good luck.
sudo apt-get install git cmake build-essential libgl1-mesa-dev libsdl2-dev libsdl2-image-dev libsdl2-ttf-dev libsdl2-gfx-dev libboost-all-dev libdirectfb-dev libst-dev mesa-utils xvfb x11vnc python3-pip
python3 -m pip install --upgrade pip setuptools psutil wheel
We provide solutions (may work) for potential bugs
MPE
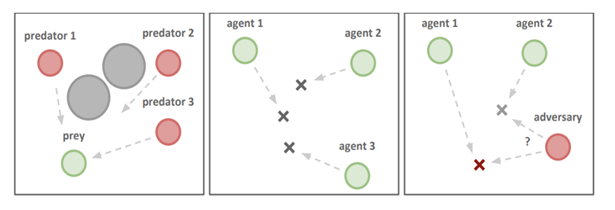
Multi-particle Environments (MPE) are a set of communication-oriented environments where particle agents can (sometimes) move, communicate, see each other, push each other around, and interact with fixed landmarks.
Official Link: https://github.com/openai/multiagent-particle-envs
Our version: https://github.com/Farama-Foundation/PettingZoo/tree/master/pettingzoo/mpe
|
Collaborative + Competitive |
|
Cooperative + Collaborative + Competitive + Mixed |
|
Full |
|
Discrete + Continuous |
|
1D |
|
No |
|
No |
|
/ |
|
Dense |
|
Simultaneous / Asynchronous |
Installation
We use the pettingzoo version of MPE
pip install pettingzoo[mpe]
LBF
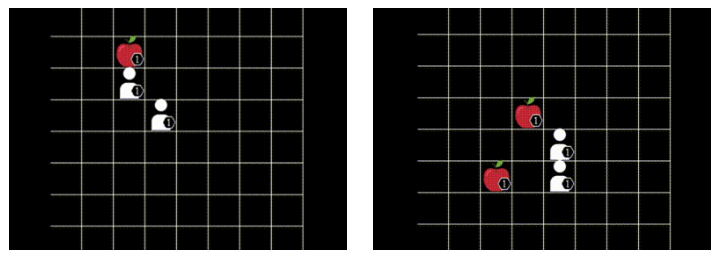
Level-based Foraging (LBF) is a mixed cooperative-competitive game that focuses on coordinating the agents involved. Agents navigate a grid world and collect food by cooperating with other agents if needed.
Official Link: https://github.com/semitable/lb-foraging
|
Cooperative + Collaborative |
|
Cooperative + Collaborative |
|
Partial |
|
Discrete |
|
1D |
|
No |
|
No |
|
/ |
|
Dense |
|
Simultaneous |
Installation
pip install lbforaging==1.0.15
RWARE
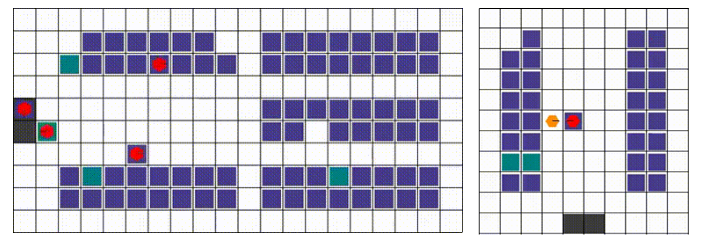
Robot Warehouse (RWARE) simulates a warehouse with robots moving and delivering requested goods. Real-world applications inspire the simulator, in which robots pick up shelves and deliver them to a workstation.
Official Link: https://github.com/semitable/robotic-warehouse
|
Cooperative |
|
Cooperative + Collaborative |
|
Partial |
|
Discrete |
|
1D |
|
No |
|
No |
|
/ |
|
Sparse |
|
Simultaneous |
Installation
pip install rware==1.0.1
MAgent
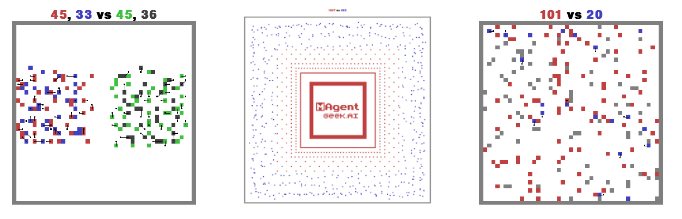
MAgent is a set of environments where large numbers of pixel agents in a grid world interact in battles or other competitive scenarios.
Official Link: https://www.pettingzoo.ml/magent
Our version: https://github.com/Farama-Foundation/PettingZoo/tree/master/pettingzoo/mpe
|
Collaborative + Competitive |
|
Collaborative + Competitive |
|
Partial |
|
Discrete |
|
2D |
|
No |
|
MiniMap |
|
2D |
|
Dense |
|
Simultaneous / Asynchronous |
Installation
pip install pettingzoo[magent]
Pommerman
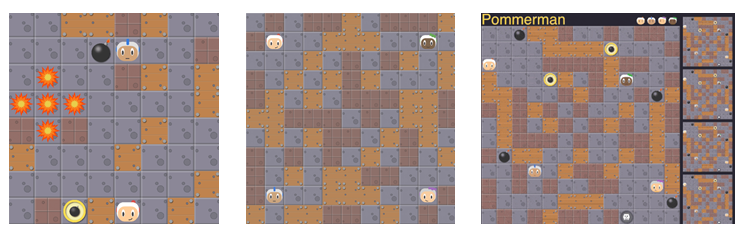
Pommerman is stylistically similar to Bomberman, the famous game from Nintendo. Pommerman’s FFA is a simple but challenging setup for engaging adversarial research where coalitions are possible, and Team asks agents to be able to work with others to accomplish a shared but competitive goal.
Official Link: https://github.com/MultiAgentLearning/playground
|
Collaborative + Competitive |
|
Cooperative + Collaborative + Competitive + Mixed |
|
Full |
|
Discrete |
|
2D |
|
No |
|
No |
|
/ |
|
Sparse |
|
Simultaneous |
Installation
git clone https://github.com/MultiAgentLearning/playground
cd playground
pip install .
cd /home/YourPathTo/MARLlib/patch
python add_patch.py --pommerman
pip install gym==0.21.0
MetaDrive
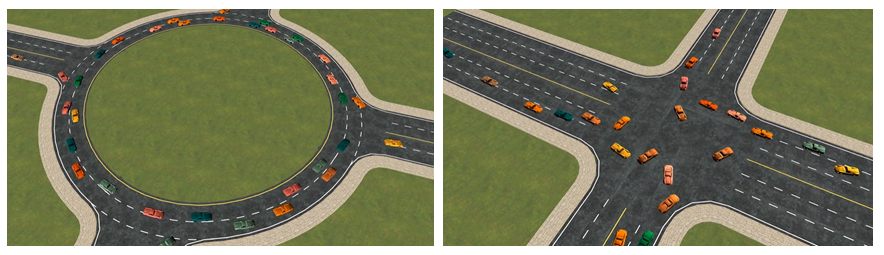
MetaDrive is a driving simulator that supports generating infinite scenes with various road maps and traffic settings to research generalizable RL. It provides accurate physics simulation and multiple sensory inputs, including Lidar, RGB images, top-down semantic maps, and first-person view images.
Official Link: https://github.com/decisionforce/metadrive
|
Collaborative |
|
Collaborative |
|
Partial |
|
Continuous |
|
1D |
|
No |
|
No |
|
/ |
|
Dense |
|
Simultaneous |
Installation
pip install metadrive-simulator==0.2.3
Hanabi
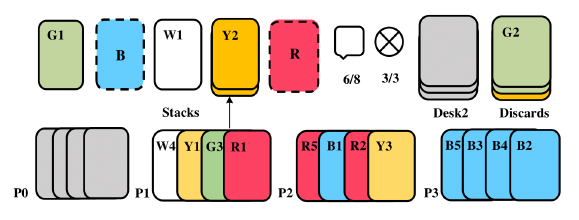
Hanabi is a cooperative card game created by French game designer Antoine Bauza. Players are aware of other players’ cards but not their own and attempt to play a series of cards in a specific order to set off a simulated fireworks show.
Official Link: https://github.com/deepmind/hanabi-learning-environment
|
Collaborative |
|
Collaborative |
|
Partial |
|
Discrete |
|
1D |
|
Yes |
|
Yes |
|
1D |
|
Dense |
|
Asynchronous |
Installation
From MAPPO official site
The environment code for Hanabi is developed from the open-source environment code but has been slightly modified to fit the algorithms used here. To install, execute the following:
pip install cffi
cd /home/YourPathTo/MARLlib/patch/hanabi
mkdir build
cd build
cmake ..
make -j
MATE
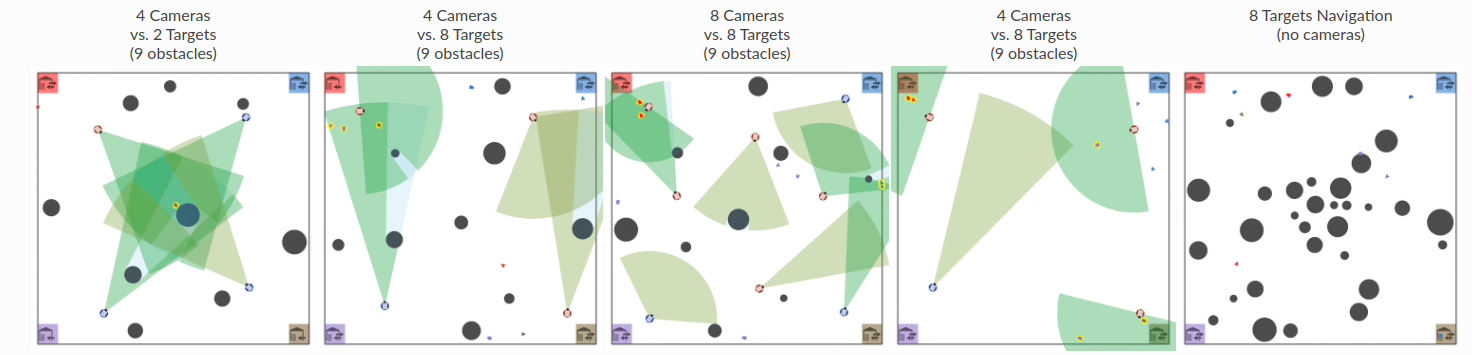
Multi-Agent Tracking Environment (MATE) is an asymmetric two-team zero-sum stochastic game with partial observations, and each team has multiple agents (multiplayer). Intra-team communications are allowed, but inter-team communications are prohibited. It is cooperative among teammates, but it is competitive among teams (opponents).
Official Link: https://github.com/XuehaiPan/mate
|
Cooperative + Mixed |
|
Cooperative + Mixed |
|
Partial |
|
Discrete + Continuous |
|
1D |
|
No |
|
No |
|
/ |
|
Dense |
|
Simultaneous |
Installation
pip3 install git+https://github.com/XuehaiPan/mate.git#egg=mate
GoBigger

GoBigger is a game engine that offers an efficient and easy-to-use platform for agar-like game development. It provides a variety of interfaces specifically designed for game AI development. The game mechanics of GoBigger are similar to those of Agar, a popular massive multiplayer online action game developed by Matheus Valadares of Brazil. The objective of GoBigger is for players to navigate one or more circular balls across a map, consuming Food Balls and smaller balls to increase their size while avoiding larger balls that can consume them. Each player starts with a single ball, but can divide it into two when it reaches a certain size, giving them control over multiple balls. Official Link: https://github.com/opendilab/GoBigger
|
Cooperative + Mixed |
|
Cooperative + Mixed |
|
Partial + Full |
|
Continuous |
|
1D |
|
No |
|
No |
|
/ |
|
Dense |
|
Simultaneous |
Installation
conda install -c opendilab gobigger